
25
Febกระบวนการ RTK (Real-Time Kinematic) ในงานวางท่อ
RTK (Real-Time Kinematic) เป็นเทคโนโลยีที่ใช้ในการเพิ่มความแม่นยำในการระบุตำแหน่งที่จาก GPS (Global Positioning System) หรือ GNSS (Global Navigation Satellite System) ในเวลาจริง โดย RTK ใช้สัญญาณจากสถานีฐานเสริม (Base Station) เพื่อช่วยปรับปรุงความแม่นยำของอุปกรณ์ที่ต้องการระบุตำแหน่ง (Rover) ในการทำงานในเวลาจริง. ข้อดีของ RTK คือมันช่วยลดความล่าช้าในการระบุตำแหน่งที่แม่นยำของอุปกรณ์ในที่ทำงาน โดยการใช้สถานีฐานเสริมเพื่อปรับปรุงความแม่นยำของการระบุตำแหน่งอย่างมีประสิทธิภาพ. นอกจากนี้ RTK ยังช่วยลดผลกระทบจากการสัญญาณรบกวนหรือสภาพแวดล้อมที่ซับซ้อนที่อาจมีผลต่อการระบุตำแหน่ง. การใช้เทคโนโลยี RTK มักพบในงานที่ต้องการความแม่นยำสูง เช่นงานก่อสร้าง, การทำแผนที่, การเกษตร, และการวางท่อใต้ดิน.

RTK (Real-Time Kinematic) เป็นเทคโนโลยีที่ใช้ในการเพิ่มความแม่นยำในการระบุตำแหน่งที่จาก GPS
กระบวนการ RTK (Real-Time Kinematic) ในงานวางท่อ เป็นกระบวนการที่ใช้ในการเพิ่มความแม่นยำของระบบนำทางดาวเทียม เช่น GPS หรือ GNSS โดยการใช้สัญญาณจากสถานีฐานเสริมเพื่อปรับปรุงความแม่นยำของตำแหน่งที่ได้รับจากอุปกรณ์ในที่ทำงาน (Rover) ในเวลาจริง กระบวนการ RTK ประกอบด้วยขั้นตอนต่อไปนี้:
สร้างสถานีฐานเสริม (Base Station): การใช้งาน RTK ต้องมีสถานีฐานเสริมที่ทราบตำแหน่งที่แน่นอน (Known Position) โดยอาจใช้ GPS หรือ GNSS เพื่อการระบุตำแหน่งของสถานีฐานเสริม
ส่งสัญญาณจากสถานีฐานเสริม (Base Station): สถานีฐานเสริมส่งสัญญาณที่ได้รับจากดาวเทียม (GPS หรือ GNSS) ไปยังอุปกรณ์ในที่ทำงาน (Rover) ผ่านช่องสื่อสารทางไร้สาย เช่นวิทยุหรืออินเทอร์เน็ต
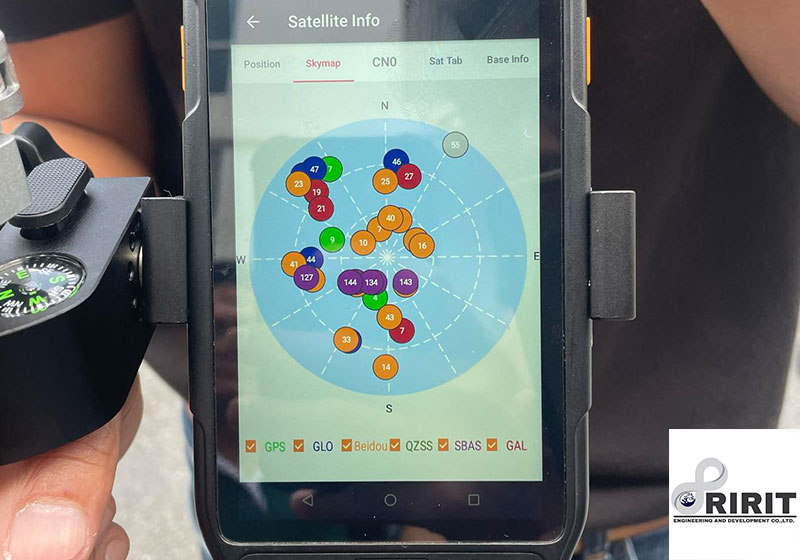
การเชื่อมต่อสัญญาณดาวเทียม
รับสัญญาณและประมวลผลในอุปกรณ์ในที่ทำงาน (Rover): อุปกรณ์ในที่ทำงาน (Rover) รับสัญญาณจากสถานีฐานเสริมและใช้ข้อมูลนั้นในการประมวลผลเพื่อปรับปรุงความแม่นยำของตำแหน่ง โดยการใช้ข้อมูลเกี่ยวกับการล่าช้าของสัญญาณจากดาวเทียมและข้อมูลอื่น ๆ
การคำนวณตำแหน่ง (Position Calculation): อุปกรณ์ในที่ทำงาน (Rover) ทำการคำนวณตำแหน่งของตนเองโดยใช้ข้อมูลจากสถานีฐานเสริม ซึ่งมักจะมีความแม่นยำสูงเนื่องจากสถานีฐานเสริมทราบตำแหน่งอย่างแน่นอน
การแจ้งผลลัพธ์ (Result Notification): อุปกรณ์ในที่ทำงาน (Rover) สามารถแจ้งผลลัพธ์ให้ผู้ใช้ทราบเมื่อมีความแม่นยำที่สูงพอที่จะนำไปใช้งานได้ โดยทั่วไปแล้ว กระบวนการ RTK จะทำให้สามารถระบุตำแหน่งได้ด้วยความแม่นยำในระดับเซนติเมตรภายในเวลาที่เรียลไทม์ ซึ่งมีประโยชน์ในงานที่ต้องการความแม่นยำสูง เช่น งานก่อสร้างทางบก การเกษตร หรือการวางท่อใต้ดิน

(Rover) ทำการคำนวณตำแหน่งของตนเองโดยใช้ข้อมูลจากสถานีฐานเสริม
การใช้เทคโนโลยี RTK (Real-Time Kinematic) ในงานวางท่อ
การใช้เทคโนโลยี RTK (Real-Time Kinematic) ในงานวางท่อสามารถช่วยเพิ่มความแม่นยำในการระบุตำแหน่งของท่อและการวางท่อโดยส่วนใหญ่ โดยเฉพาะในงานที่ต้องการความแม่นยำสูง เช่น งานก่อสร้างทางบกหรือทางน้ำที่ต้องการวางท่อใต้ดินหรือในทะเล นอกจากนี้ยังมีข้อดีอื่น ๆ ที่มาพร้อมกับการใช้ RTK ในงานวางท่อดัง ความแม่นยำ: RTK ช่วยเพิ่มความแม่นยำในการระบุตำแหน่งของท่อโดยใช้สัญญาณ GPS หรือ GNSS จากสถานีฐานเสริม เมื่อนำมาใช้งานร่วมกับอุปกรณ์ในที่ทำงาน (Rover) ทำให้สามารถระบุตำแหน่งได้แม่นยำในเส้นทางการวางท่อ ประหยัดเวลา: การใช้ RTK ช่วยลดเวลาในกระบวนการวางท่อ เนื่องจากมีการระบุตำแหน่งที่แม่นยำที่มากขึ้น ลดความต้องการในการทำงานซ้ำซ้อนหรือการปรับแต่งตำแหน่ง ลดค่าใช้จ่าย: การลดเวลาในกระบวนการวางท่อจะส่งผลให้ลดค่าใช้จ่ายในการจ้างแรงงานและเครื่องมือ เนื่องจากมีประสิทธิภาพในการทำงานมากขึ้น เพิ่มประสิทธิภาพในการจัดการโครงการ: การใช้ RTK ช่วยให้สามารถวางท่อในตำแหน่งที่แม่นยำและตรงตามแผนการก่อสร้าง ซึ่งทำให้เกิดประสิทธิภาพในการจัดการโครงการและลดความผิดพลาดในการวางท่อ ความสะดวกสบาย: การใช้เทคโนโลยี RTK ช่วยลดความซับซ้อนในกระบวนการวางท่อและการปรับแต่งตำแหน่ง ทำให้งานมีความสะดวกสบายและรวดเร็วขึ้น ดังนั้น การใช้เทคโนโลยี RTK ในงานวางท่อมีประโยชน์มากในการเพิ่มความแม่นยำและประสิทธิภาพในกระบวนการวางท่อทั้งในงานก่อสร้างทางบกและทางน้ำ ลดความผิดพลาดและค่าใช้จ่ายในโครงการได้เป็นอย่างมาก และช่วยให้งานวางท่อเป็นไปได้อย่างเรียบง่ายและมีประสิทธิภาพมากยิ่งขึ้น

ผู้เขียนกับทดลองใช้ RTK
การใช้เทคโนโลยี RTK ในอุปกรณ์ทำงาน (Rover) จะต้องมีความสามารถในการรับสัญญาณ RTK และสามารถเชื่อมต่อกับสถานีฐานเสริมได้เพื่อรับข้อมูลตำแหน่งแบบแม่นยำในเวลาจริง การจัดการและวางท่อ ระหว่างขบวนการดันลอด อุปกรณ์ทำงาน (Rover) จะติดตามตำแหน่งของหัวเจาะนำหรืออุปกรณ์การดักจับที่ใช้ในการดันลอด โดยอาจมีการใช้เทคโนโลยี RTK เพื่อปรับปรุงความแม่นยำของตำแหน่งเพื่อให้ท่อวางได้อย่างแม่นยำ เทคโนโลยี RTK สามารถช่วยในการควบคุมความลึกและทิศทางของการดันลอดในเวลาจริง เพื่อให้ท่อวางตามแผนการวางท่ออย่างแม่นยำอุปกรณ์ทำงาน (Rover) สามารถทำการประมวลผลตำแหน่งและส่งข้อมูลตำแหน่งที่แม่นยำกลับไปยังระบบควบคุมเพื่อการบันทึกข้อมูลหรือการควบคุมกระบวนการต่อไป
WHO WE ARE
บริษัท ริฤทธิ์ เอ็นจิเนียริ่ง แอนด์ ดีเวลลอปเม้นท์ จำกัด รับเหมาก่อสร้างและตัวแทนจำหน่ายท่อกับข้อต่อโพลีเอทิลีนความหนาแน่นสูง(HDPE) รับเชื่อมท่อ pe,รับเชื่อมท่อ hdpe,สำหรับงานวางท่อประปา, ท่อระบายน้ำ, ท่อสำหรับร้อยสายไฟฟ้า, และท่อสำหรับร้อยสายสื่อสาร